



【导语】机器人行业发展势头强劲,预计到 2040 年通用机器人市场规模近 3700 亿美元,其增长由技术创新、自动化需求及成本效益提升驱动,AI、IoT 等(děng)技(jì)术(shù)推(tuī)动(dòng)其(qí)应(yīng)用(yòng)拓(tà)展(zhǎn)。面(miàn)对(duì)机(jī)器(qì)人(rén)开(kāi)发(fā)中(zhōng)精(jīng)准(zhǔn)定(dìng)位(wèi)、可(kě)靠(kào)连(lián)接(jiē)等(děng)挑(tiāo)战(zhàn),Qorvo凭(píng)借(jiè)连(lián)接(jiē)、传(chuán)感(gǎn)和(hé)电(diàn)源(yuán)管(guǎn)理(lǐ)领(lǐng)域的(de)解(jiě)决(jué)方(fāng)案(àn)组(zǔ)合,以先进技术助力工程人员攻克难题,推动更智能、高效、互联的机器人走向市场 。
机器人行业发展(zhǎn)势(shì)头(tóu)迅猛。随着机器人技术(shù)持(chí)续(xù)进(jìn)步(bù),工(gōng)程(chéng)师(shī)在(zài)设(shè)计(jì)系(xì)统(tǒng)时(shí)面(miàn)临(lín)日(rì)益(yì)严(yán)峻(jùn)的(de)挑(tiāo)战(zhàn),要(yào)求(qiú)系(xì)统(tǒng)更(gèng)智(zhì)能(néng)、更(gèng)高(gāo)效(xiào),并(bìng)能(néng)更(gèng)好(hǎo)地(de)适(shì)配(pèi)不(bù)同(tóng)环(huán)境(jìng)。从(cóng)工(gōng)业(yè)自(zì)动(dòng)化(huà)与(yǔ)物(wù)流(liú),到(dào)医(yī)疗(liáo)保健和服务机器人等领域,现代设计必须在紧凑且经济高效的架构内实现精准的运动控制、可靠的连接,以及强大的电源管理。满足这些需求,离不开既能平衡性能与效率,又能实现无缝系统集成的先进技术。
Qorvo凭借在连接、传感和电源管理(lǐ)领(lǐng)域的(de)解(jiě)决(jué)方(fāng)案(àn)组(zǔ)合,助力工程人员克服上述挑战,为下一代机器人创新提供支持。
市场与应用格局
根据麦肯锡2025年6月发布的一份报告,假(jiǎ)设(shè)具(jù)身(shēn)人(rén)工(gōng)智(zhì)能(néng)(embodied AI)及(jí)相(xiāng)关软(ruǎn)件(jiàn)稳(wěn)步(bù)发(fā)展(zhǎn),到(dào)2040年(nián),通(tōng)用(yòng)机(jī)器(qì)人(rén)市(shì)场(chǎng)规(guī)模(mó)有(yǒu)望(wàng)达(dá)到(dào)近(jìn)3700亿(yì)美(měi)元(yuán)。这(zhè)凸(tū)显(xiǎn)了(le)机(jī)器(qì)人(rén)技(jì)术(shù)在(zài)制(zhì)造(zào)业(yè)、物(wù)流(liú)业(yè)、军(jūn)事(shì)、医(yī)疗(liáo)保(bǎo)健(jiàn)等(děng)领(lǐng)域及(jí)更(gèng)广(guǎng)泛(fàn)市(shì)场(chǎng)空间内强劲且可持续的增长势头。人工智能(AI)、物联网(IoT)和云计算等技术的进步推动了这一扩张(zhāng),助(zhù)力(lì)机(jī)器(qì)人(rén)走(zǒu)出(chū)传(chuán)统(tǒng)应(yīng)用(yòng)场(chǎng)景(jǐng),胜(shèng)任(rèn)日(rì)益(yì)多(duō)样(yàng)化(huà)与(yǔ)复(fù)杂(zá)的(de)任(rèn)务(wu)。
这(zhè)一(yī)增(zēng)长(zhǎng)主要(yào)由(yóu)三(sān)大(dà)因(yīn)素(sù)驱(qū)动(dòng):首(shǒu)先(xiān)是(shì)快(kuài)速(sù)的(de)技(jì)术(shù)创(chuàng)新(xīn),让(ràng)机(jī)器(qì)人(rén)变(biàn)得(de)更(gèng)智(zhì)能(néng)、功(gōng)能(néng)更(gèng)多(duō)样(yàng);二(èr)是(shì)各行业对自动化的需求日益增长;以及通过减少人力投入实现成本效益的提升。全球机器人领域的五大趋势如下:
AI与机器学习
协作机器人——专为与人类安全、高效协同作业而设计
移动机械臂——融合自主导航移动底盘与任务执行机械臂的机器人
数字孪生——通过实时双向数据流构建的物理机器人系统动态虚拟映射
类人机器人——采用类人躯体设计的机器人,具备头部、躯干和腿部结构
这些趋势共同重新定义了机器人与环境的交互方式、复杂任务的执行能力,以及与人类安全协作的模式。
Qorvo如何将设计难题转化为优化解决方案
机器人技术开发工程人员面临诸多关键设计挑战,例如:
实现精准定位与精确运动控制等机器人功能
提供强健、低延迟连接以实现无缝的指令及控制
在各种工业或户外环境中获得可靠的自主导航和操作
在各种工况下保障系统安全性、可靠性与性能一致性
降低BOM成本及整体系统尺寸,以提高效率和可制造性
针对当今机器人领域最紧迫的设计挑战,Qorvo提供一整套全面的组件,为广泛的应用领域带来精准度、可靠性,和高效性。
对于精准定位和自主移动,Qorvo的超宽带(UWB)定位解决方案可获得±5厘米的测距精度,在仓库或生产环境中实现资产跟踪和自主导航等高级功能。
在现代机器人系统中,电源管理同样举足轻重;Qorvo利用灵活的电池管理系统(BMS)满足这些需求。该系统支持10节至20节电芯应用,适用于各种电芯化学体系。工业级BMS安全功能进一步增强了系统安全性,提供快速故障保护、精准电芯均衡,以及精确的荷电状态(SOC)和健康状态(SOH)监测;这对于维持机器人集群的可靠性和最大化正常运行时间至关重要。
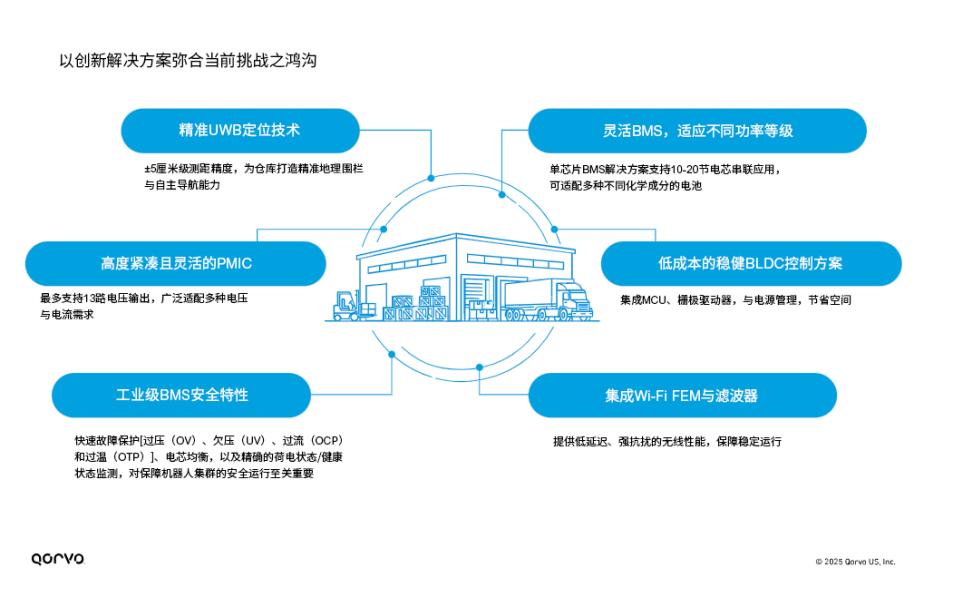
图1,Qorvo如何应对机器人解决方案中的挑战
为了高效供电和调节电源,Qorvo紧凑、灵活的电源管理IC(PMIC)提供多路高压轨,以满足广泛的系统电压和电流需求,优化性能及电路板空间。
在电机控制方面,稳健的无刷直流(BLDC)驱动解决方案将微控制器(MCU)、栅极驱动器,和电源管理集成在一个节省空间的配置中,降低系统成本及复杂性。
最后,为确保无缝通信和控制,Qorvo的集成式Wi-Fi前端模块(FEM)和滤波器带来低延迟、无干扰的无线连接,即使在具有挑战性的RF环境中也能支持稳定且响应迅速的运行。这些技术共同助力工程人员设计出更强大、高效,且互联的机器人系统,在多样化应用场景与环境条件下可靠运行。
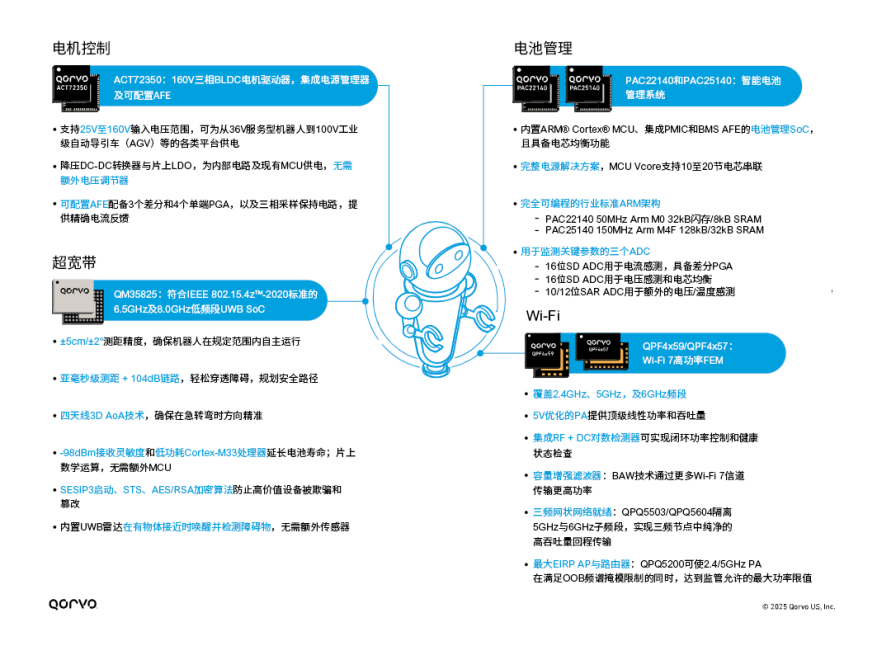
图2,应对机器人技术应用挑战的组件特性
参考设计框图
Qorvo的参考设计框图凸显了RF技术、电源管理、电池管理,和电机控制在机器人技术中的无缝集成。
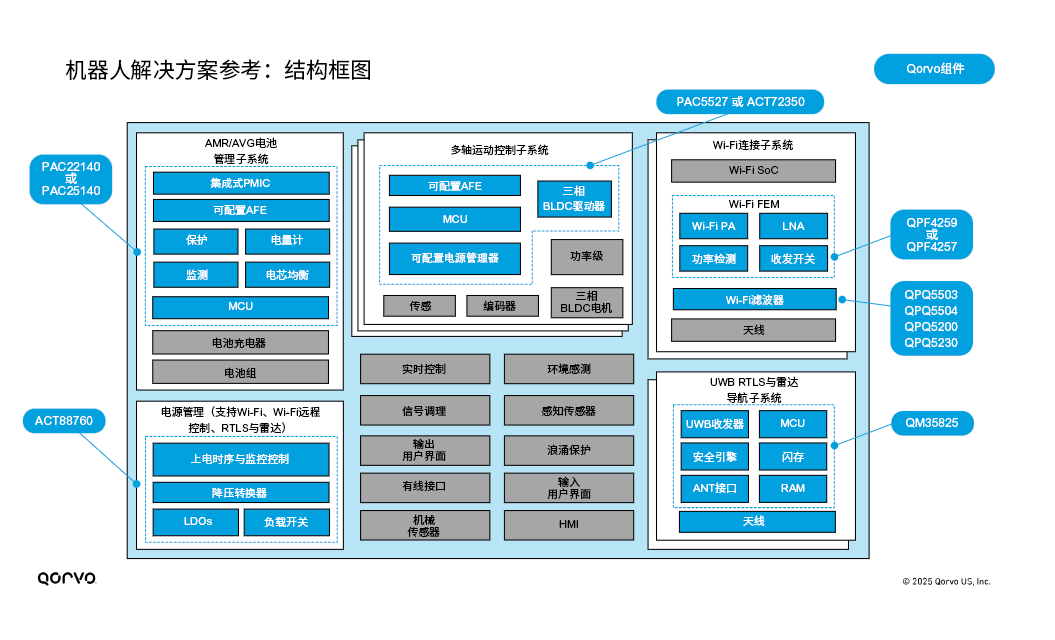
图3,机器人解决方案的高级参考设计
Qorvo 产品推荐
电机控制与驱动器
PAC5527
48V BLDC/PMSM可编程电(diàn)机(jī)控(kòng)制(zhì)器(qì)与(yǔ)驱(qū)动(dòng)器(qì),搭(dā)载(zài)150MHz ARM Cortex M4F处(chù)理(lǐ)器(qì)
ACT72350
160V栅(zhà)极(jí)驱动器,配备可配置AFE及内置电源管理器
电池管理系统
PAC22140
包含50MHz ARM Cortex M0处理器;并配备断路器控制、电芯均衡、电源管理,以及集成在AFE中的双16位ADC、保护比较器,和DAC
PAC25140
包含150MHz ARM Cortex M4F处理器;并配(pèi)备(bèi)浮(fú)点运算单元、断路器控制、电芯均衡、电源管理,以及集成在AFE中的双16位ADC、保护比较器,和DAC
ACT88760
5V PMIC,含7个大电流降压转换器、6个LDO,和10个GPIO
超宽带解决方案
QM35825
6.5GHz和8.0GHz UWB收发器,集成4个灵活RF端口、LNA、PA和RF开关,搭载带安全隔离区的Cortex-M33处理器,并配备丰富的安全特性与通信外设
Wi-Fi 前端模块
QPF4259
2GHz Wi-Fi 7高功率FEM,5V高增益低噪声系数,具备二次与三次谐波滤波功能,并支持5GHz抑制以实现DBDC工作模式
QPF4257
2GHz Wi-Fi 7高功率FEM,5V高增益低噪声系数,具备二次与三次谐波滤波功能,并支持5GHz抑制以实现DBDC工作模式
Wi-Fi BAW 滤波器
QPQ5503、QPQ5604、QPQ5200、QPQ5230
高功率Wi-Fi共存BAW带通滤波器,适用于2.4、5、6GHz频段
结论
随着机器人应用在各行业不断拓展,实现性能、可靠性和能效的提升已成为在实际应用中取得成功的关键。Qorvo利用成熟的技术,助力工程人员达成这些目标;这些技术能够简化复杂的设计难题——从基于UWB的精准定位、安全可靠的连接,到高效的电源控制与系统优化。通过将创新与实用的集成技术相结合,Qorvo使开发人员能够更快地将更智能、功(gōng)能(néng)更强大,且高度互联的机器人推向市场。
